IntroductionPervasive networks of computing,
communicating, and sensing devices will be embedded in future
environments. These devices will include the likes of RFIDs,
active badges, and sensor networks. For the most part, these
devices are framed in the context of enabling and supporting human
activities. We posit that these networks can also support, and be
supported by, robot systems, and particularly mobile robot
systems.
We studying systems of mobile robots and embedded
networks. In particular, we are investigating ways mobility can
improve sensor networks and how pervasiveness can impact
autonomous mobile robots. We consider a heterogeneous system
composed of small, embedded, immobile, possibly sensor-less,
communication nodes and larger mobile robots equipped with sensors
and manipulators. We feel this heterogeneous system of embedded
devices and mobile robots puts a natural constraint on the design
space of multi-robot systems. The embedded network serves as a
pervasive communication, computation, and coordination fabric,
while the mobile robots provide sensing and actuation.

The Hardware PlatformWe have implemented a hardware
platform for building embedded networks to support mobile robots.
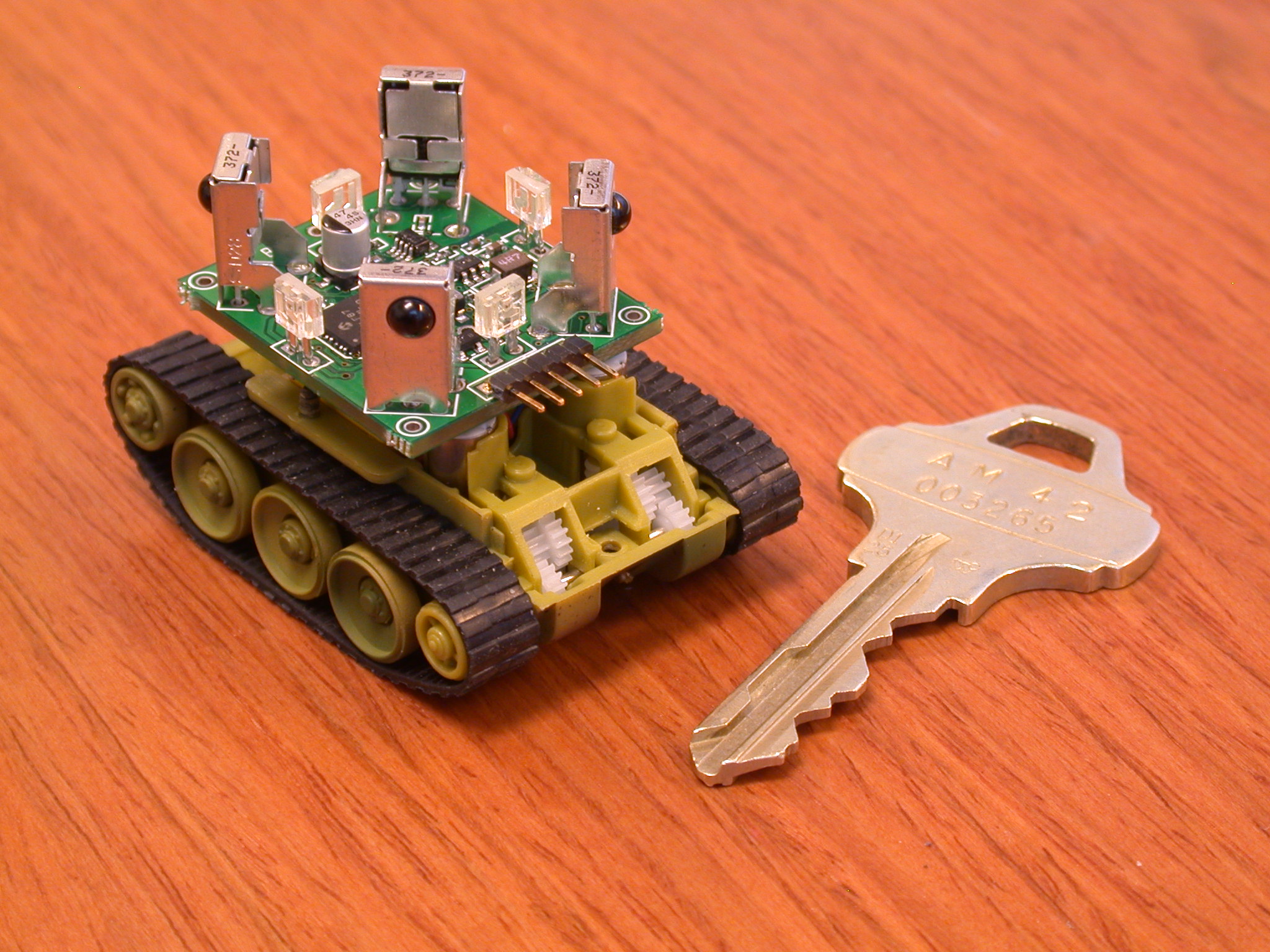
The GNATs are low cost devices, allowing us to build a large
number of them, and are highly configurable. The GNATs consist of
four infrared (IR) emitters, four IR receivers, a thermometer, two
visible light LEDs, a button, a Microchip PIC16F87
microcontroller, and a 3V battery. The simplicity of the platform
makes it very inexpensive (less than $30), allowing us to build,
and experiment with, a large number of devices. The platform is
compatible with the LEGO Mindstorms robotics kit permitting the
gnats to interact with RCX robots as well as with PCs via the LEGO
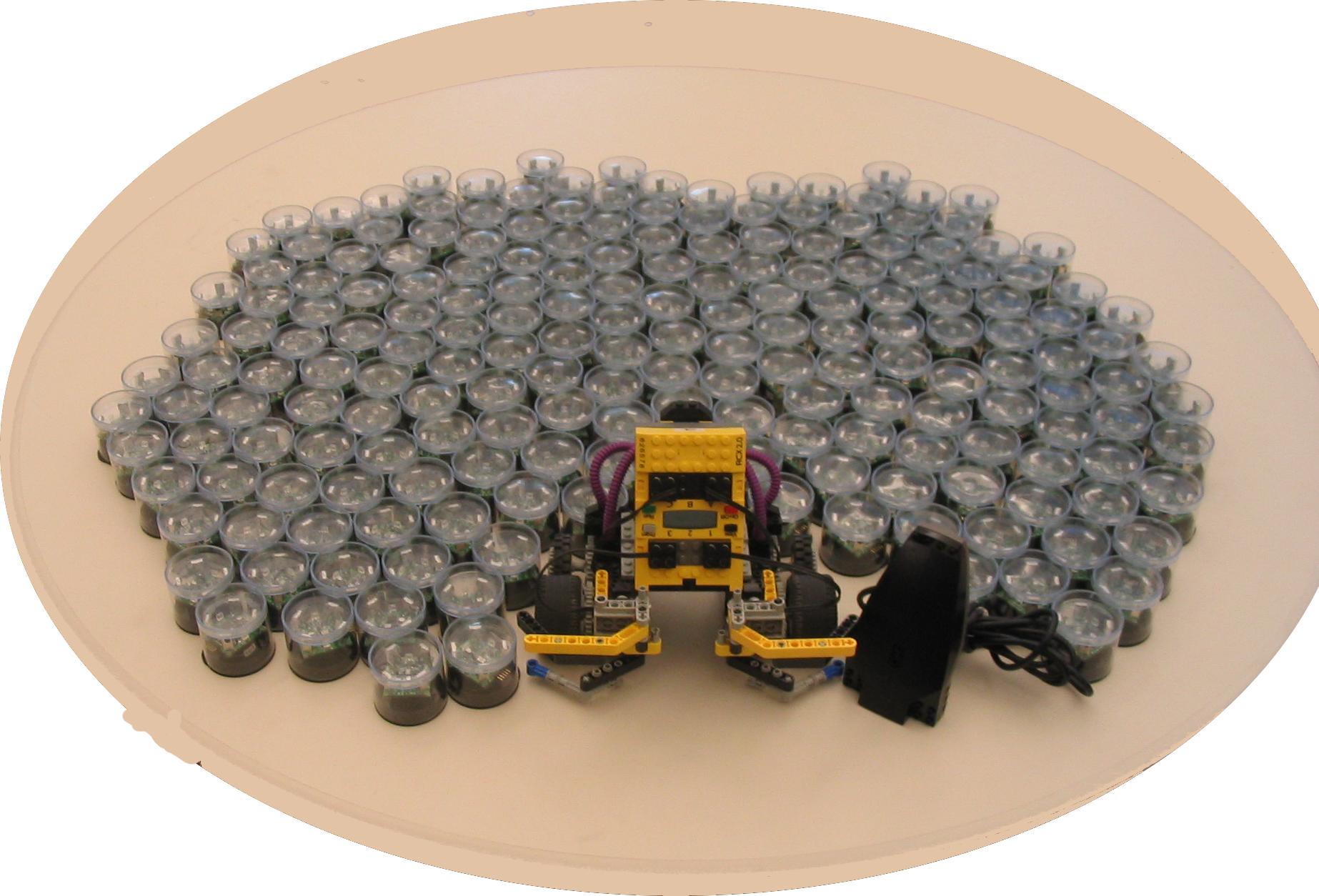
IR dongle. We use the IR dongle to program hundreds of GNATs at
once.
(Victor Bigio tests our newly assembled shipment of
300 GNATs.)
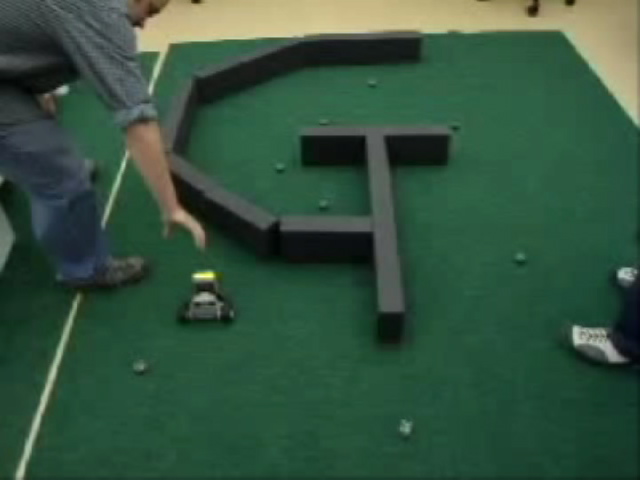
ApplicationsWe are investigating a type of physical path
planning using a large number of immobile robots called a
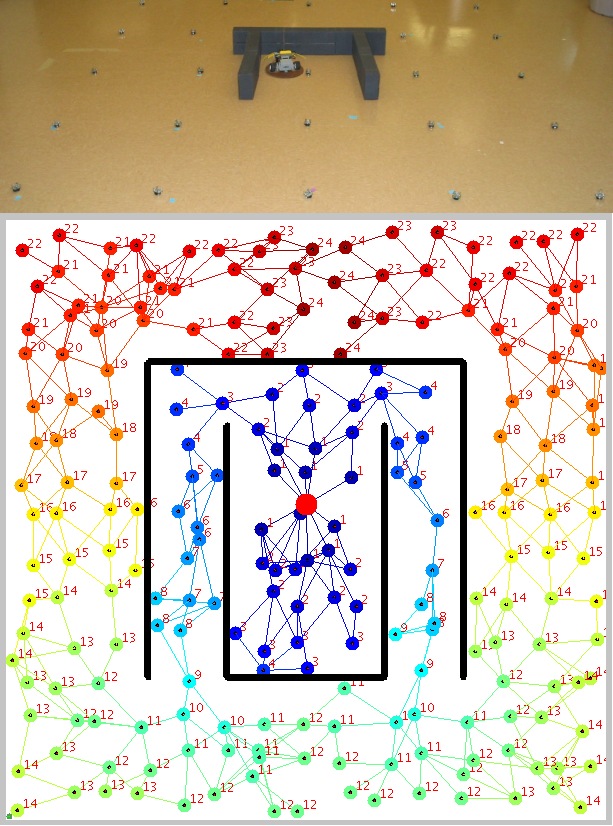
navigation network. The algorithm essentially works as a
distributed variant of the popular wave-front path planning
algorithm, or a breadth-first search from the goal, propagating
paths from the goal location. The embedded nodes make up the
vertices of the path planning graph, and the network connections
between them are the edges of the graph. Mobile robots can then
use reactive navigation to traverse the graph by visiting the
vertices (i.e. the embedded nodes) to the goal. The embedded
network aides mobile robots in various tasks such as coverage,
recruitment, and path planning.
The path planning
technique is a physical manifestation of asynchronous or
distributed dynamic programming, a multi-agent approach to dynamic
programming. A navigation network uses a physical, situated,
multi-agent system to approximate the entire state space of the
path-finding problem. The embedded network supports effective
cooperative forging by coordinating coverage patterns and by
providing nearly optimal path planning without the network nodes
or the robots having global knowledge or localization
capabilities. In addition, the network can provide paths for the
robots in dynamic environments where paths are created and
destroyed dynamically.
MobilityWe are currently adding mobility to the GNATs
platform. This limited form of mobility can be used for initial
deployment and reconfiguration of the network.
|